
Monociclo Autobilanciato con Arduino: VertiBOT
Bentornati!!!
Oggi vogliamo porgere la vostra attenzione su un monociclo robotizzato completamente controllato da Arduino.
Il progetto è stato realizzato utilizzando un controllore PID e un Arduino Nano. In più alcune parti sono state realizzate tramite stampa 3d.
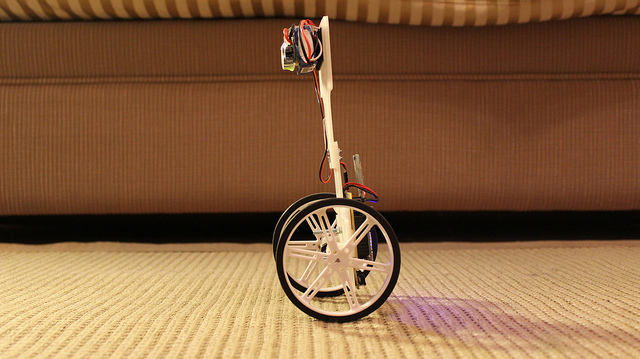
VertiBOT – Monociclo autobilanciato
Andiamo a vedere nel dettaglio il funzionamento.
VertiBOT (il monociclo autobilanciato di cui sopra) usa come attuatori due motori DC regolati da un driver di potenza. Questi motori sono responsabili della generazione della coppia necessaria alle ruote per mantenere la struttura in una posizione angolare quanto più vicina possibile a gli 0°.
Se si vuole mantenere un equilibrio è molto importante sapere, con buona precisione e in tempo reale, la reale inclinazione della struttura (segnale di retroazione). Tale misura viene realizzata grazie ad un accelerometro e un giroscopio. Per la discussione su bilanciamento, errori, filtri e quant’altro rimandiamo a questo file. La differenza tra il segnale di riferimento ed il segnale di retroazione è l’errore: elemento necessario per agire di conseguenza e “correggere” il disturbo.
Scoperto il valore dell’errore, dobbiamo definire il controllore cioè colui che agisce sugli attuatori per ridurre quanto più possibile l’errore (nel nostro caso porterà il monociclo autobilanciato in posizione verticale). Basta cercare un pò su internet e dare un’occhiatta alla teoria dei controlli per capire che un PID è quello che ci vuole!
Un regolatore PID base ha un ingresso e una uscita (SISO – single in single out). L’ingresso del PID sarà l’errore, l’uscita il numero di giri al quale dovranno ruotare i motori DC per compensare il disturbo.
L’ hardware utilizzato in questo progetto consta di:
- Un microcontrollore a 16MHz ATmega328 (Arduino Nano).
- 6DOF IMU: accelerometro e giroscopio. ADXL345 / ITG3200 Comunicazione I2C
- Driver di potenza per motori
- Modem Bluetooth per la comunicazione senza fili in tempo reale
- Potenziometri per la regolazione PID
- Pulsanti per diversi compiti: modifiche all’algoritmo, offset di calibrazione…
- Regolatore di tensione (MCP1700) e software di conversione.
Non ci rimane che mostrarvi un video del risultato:
Cosa ne pensate? A noi piace da morire!
Fonte: Made By Frutos
Namastè
Commenti: 2
[…] Monociclo Autobilanciato con Arduino: VertiBOT […]
Vi segnalo anche il Solopattino, è il primo produttore e brand italiano http://www.solopattino.it, ed è uno dei pochi realmente certificati CE è garantiti in Italia.